 Campo
Científico y Tecnológico
Campo
Científico y Tecnológico

Prueba de comunicación con el Arduino
//Programa para el parpadeo de un LED
//conecta el ánodo de un LED en el pin 13 y el cátodo en el negativo, que está justo al lado
void setup()
{
pinMode(13,OUTPUT);
}
void loop()
{
digitalWrite(13,HIGH); //conecta la salida 13
delay(1000); //para la ejecución del programa 1000 milisegundos
digitalWrite(13,LOW); //desconecta la salida 13
delay(1000); //para la ejecución del programa 1000 milisegundos
}Scratch Day
La universidad Oberta de Catalunya y Uniminuto les dan la bienvenida y los invitan a participar activamente en la jornada del DÍA MUNDIAL DEL SCRATCH.
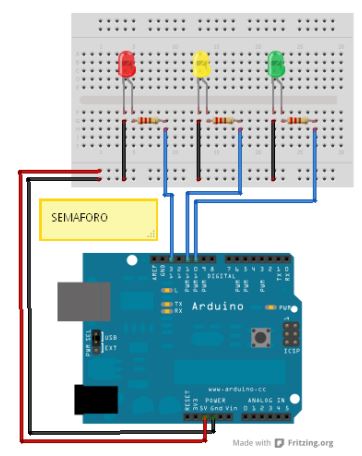
Montaje en Protoboard
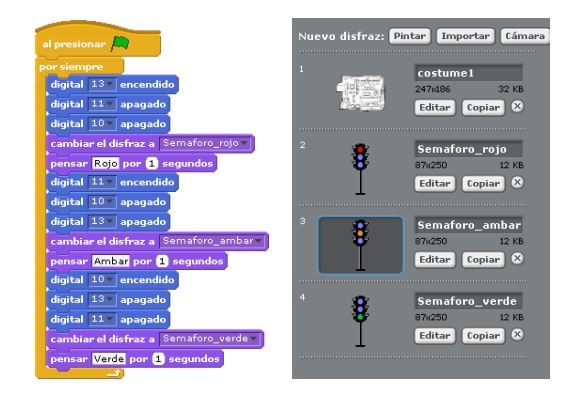
Implementación del código
Recursos

Software de conexión para activar la placa Arduino
// NEW IN VERSION 1.6c (by Jorge Gomez):
// Fixed variable type in pin structure: pin.state should be int, not byte
// Optimized speed of execution while receiving data from computer in readSerialPort()
// NEW IN VERSION 1.6b (by Jorge Gomez):
// Added new structure arduinoPins to hold the pins information:
// - This makes the code easier to read and modify (IMHO)
// - Allows to change the type of pin more easily to meet non standard use of S4A
// - Eliminates the need of having to deal with different kind of index access (ie: states[pin-4])
// - By using an enum to hold all the possible output pin states the code is now more readable
// Changed all functions using old style pin access: configurePins(), resetPins(), readSerialPort(), updateActuator() and sendUpdateActuator()
// Fixed possible overflow every 70 minutes (2e32 us) in pulse() while using micros(). Changed for delayMicroseconds()
// Some minor coding style fixes
// NEW IN VERSION 1.6a (by Jorge Gomez):
// Fixed compatibility with Arduino Leonardo by avoiding the use of timers
// readSerialPort() optimized:
// - created state machine for reading the two bytes of the S4A message
// - updateActuator() is only called if the state is changed
// Memory use optimization
// Cleaning some parts of code
// Avoid using some global variables
// NEW IN VERSION 1.6:
// Refactored reset pins
// Merged code for standard and CR servos
// Merged patch for Leonardo from Peter Mueller (many thanks for this!)
// NEW IN VERSION 1.5:
// Changed pin 8 from standard servo to normal digital output
// NEW IN VERSION 1.4:
// Changed Serial.print() for Serial.write() in ScratchBoardSensorReport function to make it compatible with latest Arduino IDE (1.0)
// NEW IN VERSION 1.3:
// Now it works on GNU/Linux. Also tested with MacOS and Windows 7.
// timer2 set to 20ms, fixing a glitch that made this period unstable in previous versions.
// readSerialport() function optimized.
// pulse() modified so that it receives pulse width as a parameter instead using a global variable.
// updateServoMotors changes its name as a global variable had the same name.
// Some minor fixes.
typedef enum {
input, servomotor, pwm, digital }
pinType;
typedef struct pin {
pinType type; //Type of pin
int state; //State of an output
//byte value; //Value of an input. Not used by now. TODO
};
pin arduinoPins[14]; //Array of struct holding 0-13 pins information
unsigned long lastDataReceivedTime = millis();
void setup()
{
Serial.begin(38400);
Serial.flush();
configurePins();
resetPins();
}
void loop()
{
static unsigned long timerCheckUpdate = millis();
if (millis()-timerCheckUpdate>=20)
{
sendUpdateServomotors();
sendSensorValues();
timerCheckUpdate=millis();
}
readSerialPort();
}
void configurePins()
{
arduinoPins[0].type=input;
arduinoPins[1].type=input;
arduinoPins[2].type=input;
arduinoPins[3].type=input;
arduinoPins[4].type=servomotor;
arduinoPins[5].type=pwm;
arduinoPins[6].type=pwm;
arduinoPins[7].type=servomotor;
arduinoPins[8].type=servomotor;
arduinoPins[9].type=pwm;
arduinoPins[10].type=digital;
arduinoPins[11].type=digital;
arduinoPins[12].type=digital;
arduinoPins[13].type=digital;
}
void resetPins() {
for (byte index=0; index <=13; index++)
{
if (arduinoPins[index].type!=input)
{
pinMode(index, OUTPUT);
if (arduinoPins[index].type==servomotor)
{
arduinoPins[index].state = 255;
servo (index, 255);
}
else
{
arduinoPins[index].state=0;
digitalWrite(index,LOW);
}
}
}
}
void sendSensorValues()
{
unsigned int sensorValues[6], readings[5];
byte sensorIndex;
for (sensorIndex = 0; sensorIndex < 6; sensorIndex++) //for analog sensors, calculate the median of 5 sensor readings in order to avoid variability and power surges
{
for (byte p = 0; p < 5; p++)
readings[p] = analogRead(sensorIndex);
insertionSort(readings, 5); //sort readings
sensorValues[sensorIndex] = readings[2]; //select median reading
}
//send analog sensor values
for (sensorIndex = 0; sensorIndex < 6; sensorIndex++)
ScratchBoardSensorReport(sensorIndex, sensorValues[sensorIndex]);
//send digital sensor values
ScratchBoardSensorReport(6, digitalRead(2)?1023:0);
ScratchBoardSensorReport(7, digitalRead(3)?1023:0);
}
void insertionSort(unsigned int* array, unsigned int n)
{
for (int i = 1; i < n; i++)
for (int j = i; (j > 0) && ( array[j] < array[j-1] ); j--)
swap( array, j, j-1 );
}
void swap(unsigned int* array, unsigned int a, unsigned int b)
{
unsigned int temp = array[a];
array[a] = array[b];
array[b] = temp;
}
void ScratchBoardSensorReport(byte sensor, int value) //PicoBoard protocol, 2 bytes per sensor
{
Serial.write( B10000000
| ((sensor & B1111)<<3)
| ((value>>7) & B111));
Serial.write( value & B1111111);
}
void readSerialPort()
{
byte pin;
int newVal;
static byte actuatorHighByte, actuatorLowByte;
static byte readingSM = 0;
if (Serial.available())
{
if (readingSM == 0)
{
actuatorHighByte = Serial.read();
if (actuatorHighByte >= 128) readingSM = 1;
}
else if (readingSM == 1)
{
actuatorLowByte = Serial.read();
if (actuatorLowByte < 128) readingSM = 2;
else readingSM = 0;
}
if (readingSM == 2)
{
lastDataReceivedTime = millis();
pin = ((actuatorHighByte >> 3) & 0x0F);
newVal = ((actuatorHighByte & 0x07) << 7) | (actuatorLowByte & 0x7F);
if(arduinoPins[pin].state != newVal)
{
arduinoPins[pin].state = newVal;
updateActuator(pin);
}
readingSM = 0;
}
}
else checkScratchDisconnection();
}
void reset() //with xbee module, we need to simulate the setup execution that occurs when a usb connection is opened or closed without this module
{
resetPins(); // reset pins
sendSensorValues(); // protocol handshaking
lastDataReceivedTime = millis();
}
void updateActuator(byte pinNumber)
{
if (arduinoPins[pinNumber].type==digital) digitalWrite(pinNumber, arduinoPins[pinNumber].state);
else if (arduinoPins[pinNumber].type==pwm) analogWrite(pinNumber, arduinoPins[pinNumber].state);
}
void sendUpdateServomotors()
{
for (byte p = 0; p < 10; p++)
if (arduinoPins[p].type == servomotor) servo(p, arduinoPins[p].state);
}
void servo (byte pinNumber, byte angle)
{
if (angle != 255)
pulse(pinNumber, (angle * 10) + 600);
}
void pulse (byte pinNumber, unsigned int pulseWidth)
{
digitalWrite(pinNumber, HIGH);
delayMicroseconds(pulseWidth);
digitalWrite(pinNumber, LOW);
}
void checkScratchDisconnection() //the reset is necessary when using an wireless arduino board (because we need to ensure that arduino isn't waiting the actuators state from Scratch) or when scratch isn't sending information (because is how serial port close is detected)
{
if (millis() - lastDataReceivedTime > 1000) reset(); //reset state if actuators reception timeout = one second
}
SENSOR DE REVERSA
// Pines utilizados
#define LEDVERDE 2
#define LEDAMARILLO 3
#define LEDROJO 4
#define TRIGGER 5
#define ECHO 6
#define BUZZER 9
// Constantes
const float sonido = 34300.0; // Velocidad del sonido en cm/s
const float umbral1 = 30.0;
const float umbral2 = 20.0;
const float umbral3 = 10.0;
void setup() {
// Iniciamos el monitor serie
Serial.begin(9600);
// Modo entrada/salida de los pines
pinMode(LEDVERDE, OUTPUT);
pinMode(LEDAMARILLO, OUTPUT);
pinMode(LEDROJO, OUTPUT);
pinMode(ECHO, INPUT);
pinMode(TRIGGER, OUTPUT);
pinMode(BUZZER, OUTPUT);
// Apagamos todos los LEDs
apagarLEDs();
}
void loop() {
// Preparamos el sensor de ultrasonidos
iniciarTrigger();
// Obtenemos la distancia
float distancia = calcularDistancia();
// Apagamos todos los LEDs
apagarLEDs();
// Lanzamos alerta si estamos dentro del rango de peligro
if (distancia < umbral1)
{
// Lanzamos alertas
alertas(distancia);
}
}
// Apaga todos los LEDs
void apagarLEDs()
{
// Apagamos todos los LEDs
digitalWrite(LEDVERDE, LOW);
digitalWrite(LEDAMARILLO, LOW);
digitalWrite(LEDROJO, LOW);
}
// Función que comprueba si hay que lanzar alguna alerta visual o sonora
void alertas(float distancia)
{
if (distancia < umbral1 && distancia >= umbral2)
{
// Encendemos el LED verde
digitalWrite(LEDVERDE, HIGH);
tone(BUZZER, 2000, 200);
}
else if (distancia < umbral2 && distancia > umbral3)
{
// Encendemos el LED amarillo
digitalWrite(LEDAMARILLO, HIGH);
tone(BUZZER, 2500, 200);
}
else if (distancia <= umbral3)
{
// Encendemos el LED rojo
digitalWrite(LEDROJO, HIGH);
tone(BUZZER, 3000, 200);
}
}
// Método que calcula la distancia a la que se encuentra un objeto.
// Devuelve una variable tipo float que contiene la distancia
float calcularDistancia()
{
// La función pulseIn obtiene el tiempo que tarda en cambiar entre estados, en este caso a HIGH
unsigned long tiempo = pulseIn(ECHO, HIGH);
// Obtenemos la distancia en cm, hay que convertir el tiempo en segudos ya que está en microsegundos
// por eso se multiplica por 0.000001
float distancia = tiempo * 0.000001 * sonido / 2.0;
Serial.print(distancia);
Serial.print("cm");
Serial.println();
delay(500);
return distancia;
}
// Método que inicia la secuencia del Trigger para comenzar a medir
void iniciarTrigger()
{
// Ponemos el Triiger en estado bajo y esperamos 2 ms
digitalWrite(TRIGGER, LOW);
delayMicroseconds(2);
// Ponemos el pin Trigger a estado alto y esperamos 10 ms
digitalWrite(TRIGGER, HIGH);
delayMicroseconds(10);
// Comenzamos poniendo el pin Trigger en estado bajo
digitalWrite(TRIGGER, LOW);
}